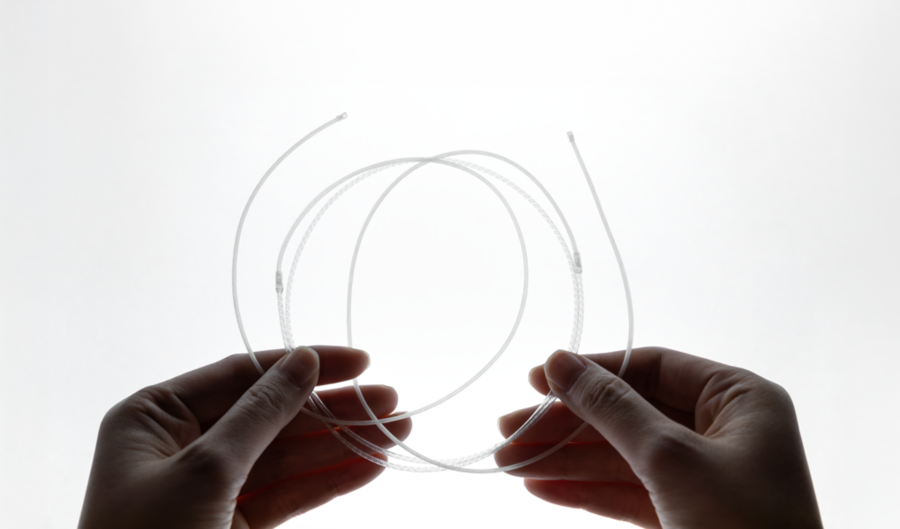
Researchers at the MIT Media Lab and Politecnico di Bari have developed new silent artificial muscle fibers for robots, potentially transforming robotic movement and wearable assistive devices. The technology, known as electrofluidic fiber muscles, was detailed in a paper published in Science Robotics.
The research team, led by MIT graduate student Ozgun Kilic Afsar and Politecnico di Bari professor Vito Cacucciolo, combines two technologies: thin McKibben actuators and miniaturized electrohydrodynamic (EHD) pumps. This system allows for movement without motors or external pumps and addresses limitations previously faced by fluid-driven soft robots.
The EHD pumps work by creating pressure in a sealed fluid compartment, allowing for movement without any mechanical parts. Each EHD pump is lightweight, weighing only a few grams and comparable in thickness to a toothpick. By using an antagonistic design where one actuator contracts while the other relaxes, the system mimics human muscle interactions.



Afsar stated, “We didn’t choose this configuration simply for the sake of biomimicry, but because we needed a way to store the fluid within the muscle design.” This configuration eliminates the requirement for an external fluid reservoir, which has limited the application of fluid-driven robots outside laboratory environments.
The fibers can be arranged in various configurations, resembling biological muscle tissue, enabling tighter packing in robotic systems. Demonstrations of the technology included a biceps-triceps pair that controlled a 3D-printed robot arm and a lever arm capable of launching objects in just 100 milliseconds.
Herbert Shea, a professor at Ecole Polytechnique Federale de Lausanne, praised the work as a significant advancement in soft actuation. He noted, “The lack of moving parts in the pump makes these muscles silent, a major advantage for prosthetic devices and assistive clothing.”
The MIT-Politecnico team anticipates that these artificial muscles could be used in various applications, from exoskeletons designed to assist in lifting heavy loads to devices aimed at restoring dexterity. Cacucciolo added, “Wherever fluidic actuators are used, or where engineers want to replace external pumps with internal ones, these design principles could apply across a wide range of fluid-driven robotic systems.” The research received support from the European Research Council and the MIT Media Lab’s multi-sponsored consortium.